Problem: Reliable Docking Is Still Hard in 2026
Your robot needs to dock accurately — charging station, conveyor handoff, delivery slot — and you've heard AprilTags might be overkill now that ArUco, QR, and even neural pose estimators exist. So which is actually worth using?
You'll learn:
- Why AprilTags still win for precision docking in most setups
- How to generate tags, tune detection, and publish a pose in ROS 2
- The one scenario where you should use something else
Time: 25 min | Level: Intermediate
Why AprilTags Still Hold Up
AprilTag 3 (the current standard) was designed around one goal: accurate 6-DOF pose at low compute cost. That's exactly what docking needs.
The alternatives in 2026 each have a catch. ArUco detection is built into OpenCV but pose accuracy is measurably worse at oblique angles. Neural pose estimators (FoundationPose, etc.) are fantastic for arbitrary objects but require a GPU and add latency that makes tight docking loops jittery. QR codes aren't designed for pose at all.
Common symptoms that bring people here:
- Dock attempts succeed at 1m but drift at 0.5m approach
- Tag detection drops out under mixed lighting
- Pose jumps between frames causing overcorrection
If any of these sound familiar, the fix is usually a tuning problem, not the wrong library.
Solution
Step 1: Generate Your Tags
Use the official apriltag-generation Python package. Don't screenshot tags from the internet — print quality and exact sizing matter for accurate pose.
pip install apriltag-generation
import apriltag
# Tag family: tag36h11 is the 2026 default — best error correction
gen = apriltag.TagGenerator("tag36h11")
# Generate tag ID 0 at 800px — scale to your physical print size later
tag = gen.generate(0)
tag.save("dock_tag_0.png")
Why tag36h11: It has the most redundancy bits of the standard families. At docking distances (0.2m–1.5m) this matters more than the slightly smaller detectable size of tag25h9.
Expected: A clean black-and-white PNG with no antialiasing on the borders.
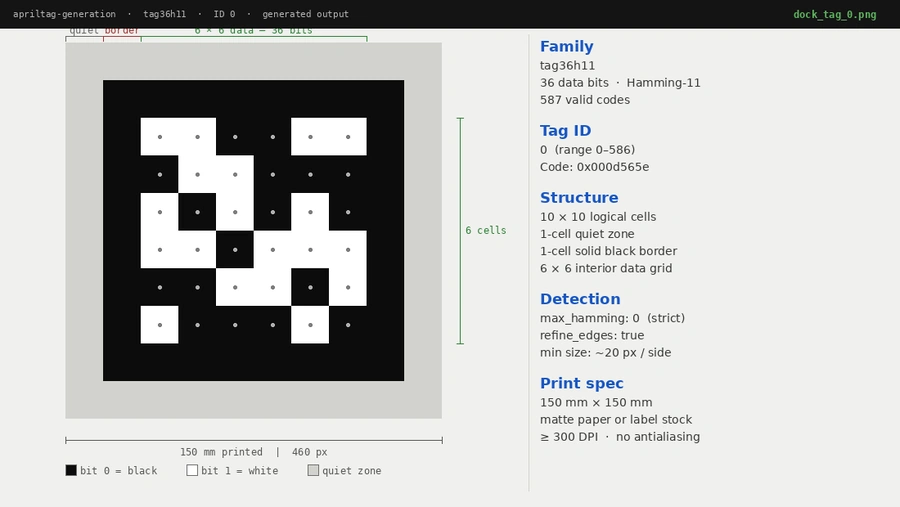 tag36h11 ID 0 — the white border (quiet zone) must be at least 1 tag-cell wide when printed
tag36h11 ID 0 — the white border (quiet zone) must be at least 1 tag-cell wide when printed
If it fails:
- ImportError:
pip install apriltag-generationnotapriltag— they're different packages - Blurry edges: Don't resize the PNG in an image editor; print at a DPI that makes the pixel grid land on exact millimeters
Step 2: Print and Mount the Tag
Physical setup is where most docking failures originate.
- Print on matte paper or matte label stock — glossy causes specular glare
- Tag size recommendation: minimum 15cm × 15cm for detection at 1.5m with a standard 1080p camera
- Mount flat and perpendicular to the expected approach angle within ±30°
- Measure the printed tag size in millimeters — you'll need this in Step 3
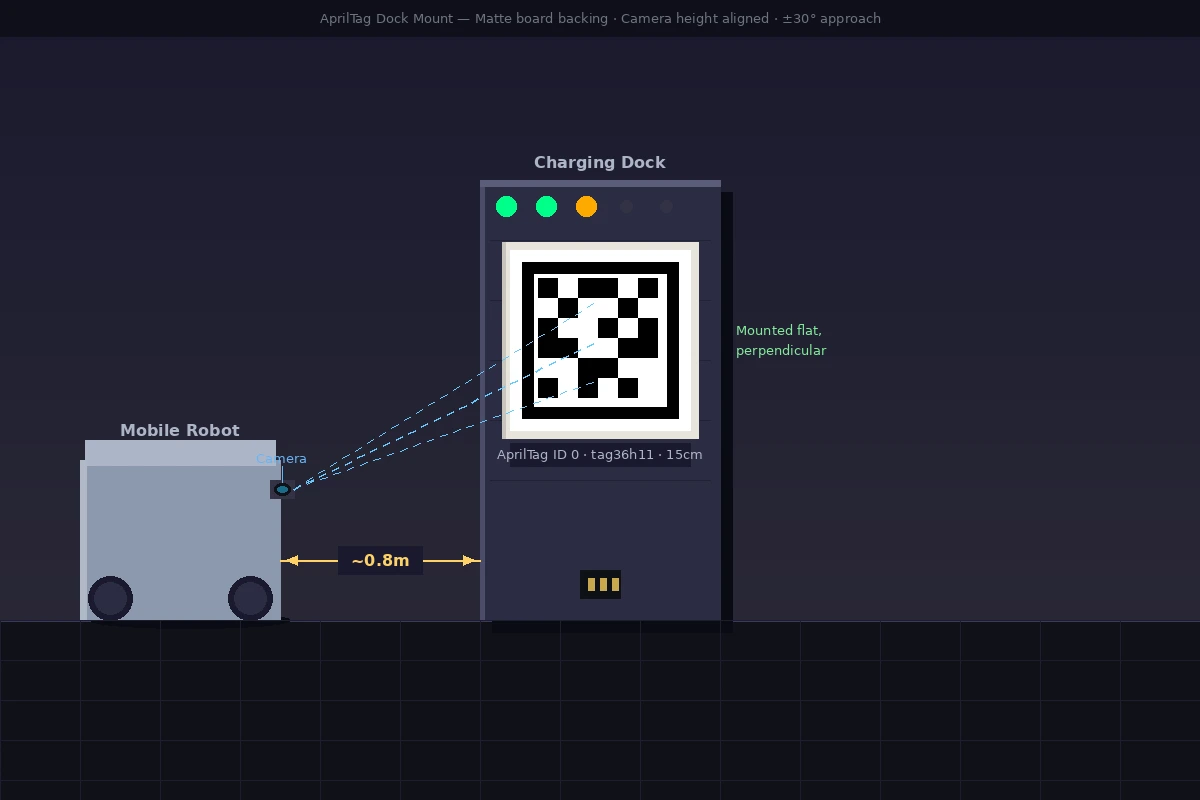 Tag mounted at camera height, centered on the dock face. Matte foam board backing prevents warping.
Tag mounted at camera height, centered on the dock face. Matte foam board backing prevents warping.
Step 3: ROS 2 Detection Node
The apriltag_ros package is the standard integration. Install it for your ROS 2 distro (Jazzy is current as of 2026):
sudo apt install ros-jazzy-apriltag-ros
Configure the detector in config/apriltag.yaml:
apriltag:
ros__parameters:
family: tag36h11
size: 0.15 # Tag size in meters — must match your printed tag
max_hamming: 0 # 0 = only perfect detections; raise to 1 if you miss frames
detector:
threads: 2
decimate: 1.0 # Increase to 2.0 on slower hardware to halve processing area
blur: 0.0
refine_edges: true # Critical for sub-pixel accuracy at close range
debug: false
tag:
ids: [0] # Whitelist your dock tag ID
frames: ["dock_tag"]
sizes: [0.15]
Launch the node:
ros2 launch apriltag_ros apriltag.launch.py \
params_file:=config/apriltag.yaml \
camera_name:=/camera \
image_topic:=image_raw
Expected: You should see /detections publishing apriltag_ros_msgs/AprilTagDetectionArray messages when the tag is in frame.
# Quick check
ros2 topic echo /detections
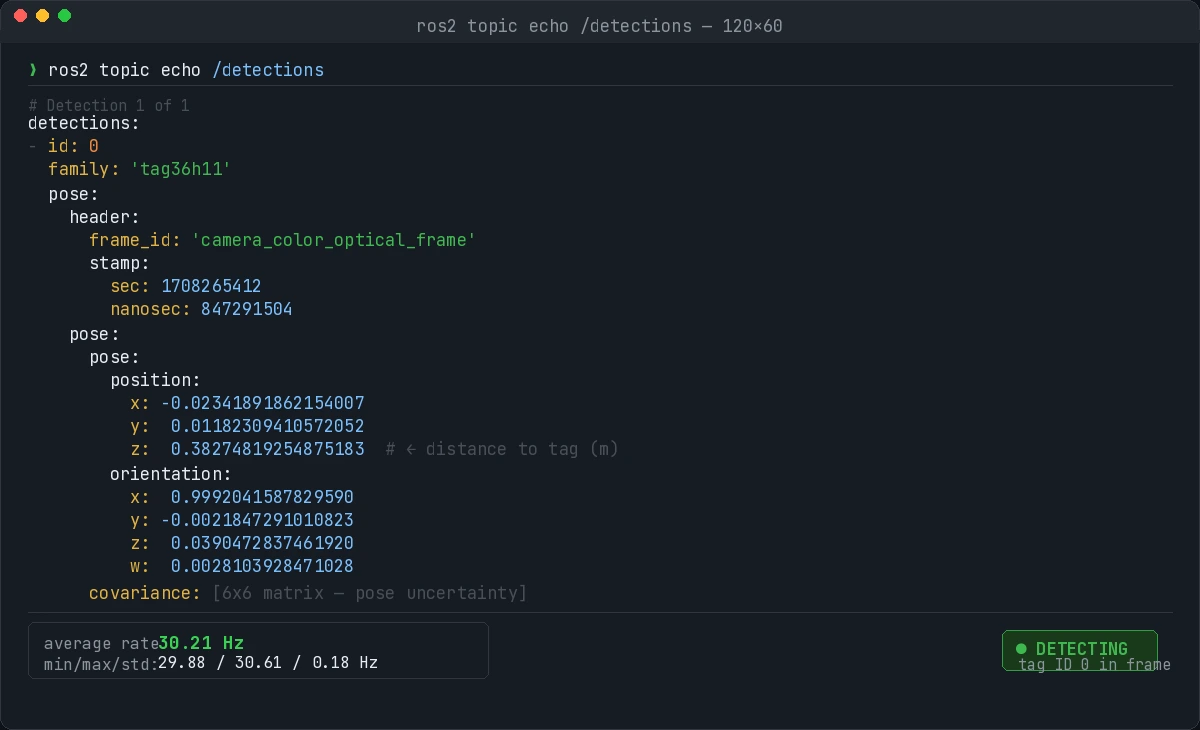 A detection with pose.position and pose.orientation — z is distance from camera
A detection with pose.position and pose.orientation — z is distance from camera
If it fails:
- No messages published: Check camera info topic is publishing calibration data — pose estimation requires it
family not found: Rebuild the package; apt version may lag behind distro release
Step 4: Use the Pose for Docking Control
The detection gives you a transform from the camera frame to the tag. Feed it directly into your docking controller:
import rclpy
from rclpy.node import Node
from apriltag_ros_msgs.msg import AprilTagDetectionArray
class DockingController(Node):
def __init__(self):
super().__init__('docking_controller')
self.sub = self.create_subscription(
AprilTagDetectionArray,
'/detections',
self.on_detection,
10
)
def on_detection(self, msg):
if not msg.detections:
return
det = msg.detections[0]
pose = det.pose.pose.pose
x = pose.position.x # Left/right offset from camera center
y = pose.position.y # Up/down offset
z = pose.position.z # Distance to tag — drive toward zero
# Simple proportional approach: reduce speed as z decreases
linear_vel = min(0.3, z * 0.5) # Cap at 0.3 m/s
angular_vel = -x * 1.2 # Steer toward center
self.publish_cmd(linear_vel, angular_vel)
Why proportional works here: For final docking (last 1.5m), you don't need a full trajectory planner. P-control on x-offset and z-distance is reliable and easy to tune. Add a D term only if you see oscillation at close range.
Verification
Run the full stack and drive toward the dock:
ros2 launch your_robot docking.launch.py
ros2 topic hz /detections # Should be ~30Hz at standard camera rate
You should see: Detection rate staying above 25Hz through the approach, z dropping smoothly to near zero, and the robot centering on the tag without overcorrection.
 Final docked position — tag centered in frame, z < 0.05m
Final docked position — tag centered in frame, z < 0.05m
What You Learned
- AprilTag 3 with tag36h11 is still the accuracy-per-compute leader for precision docking in 2026
- Physical setup (tag size, matte print, flat mount) causes more failures than software config
refine_edges: trueis the single biggest tuning lever for close-range accuracy- For GPU-enabled platforms doing multi-object manipulation, FoundationPose is worth evaluating — but not for a fixed dock marker
Limitation: AprilTags struggle at extreme angles (>60° off-axis) and in environments with strong IR lighting (some warehouses). If that's your setup, combine the tag with an IR-filtered camera or switch to a floor-based docking approach.
Tested on ROS 2 Jazzy, Ubuntu 24.04, apriltag_ros 3.2.1, Realsense D435i